so I’m trying to test the grasping functionality in the example scene but using a mouse or keyboard for the time being, soon enough I’ll convert to using VR, but for now, I need to use a mouse or keyboard.
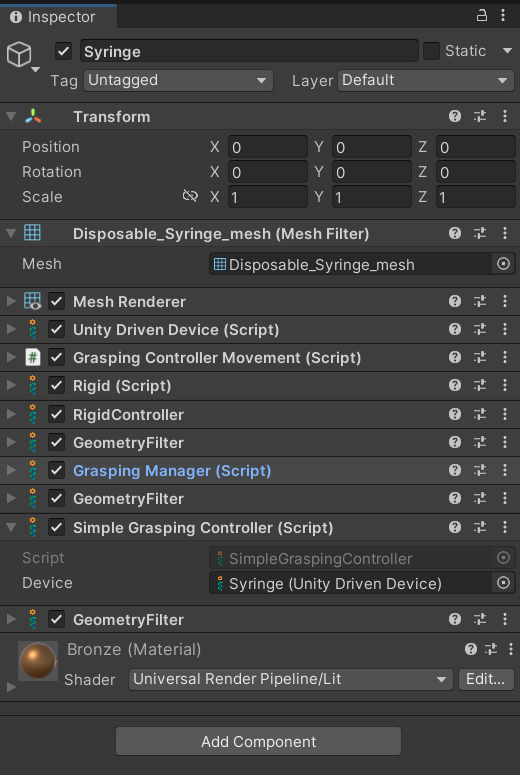
so as far as I understood is that I need a gameobject called device that has UnityDrivenDevice and as it connects the empty GameObject unity position and rotation to the syringe, and in order to use the syringe for grasping (GraspingManager) it needs rigid body (Rigid), and since there’s an interaction between rigid body and a device a RigidController needs to be added, also SimpleGraspingController needs to be added to initiate grasping I guess?.
that’s what I understood so far, If I’m wrong correct me.
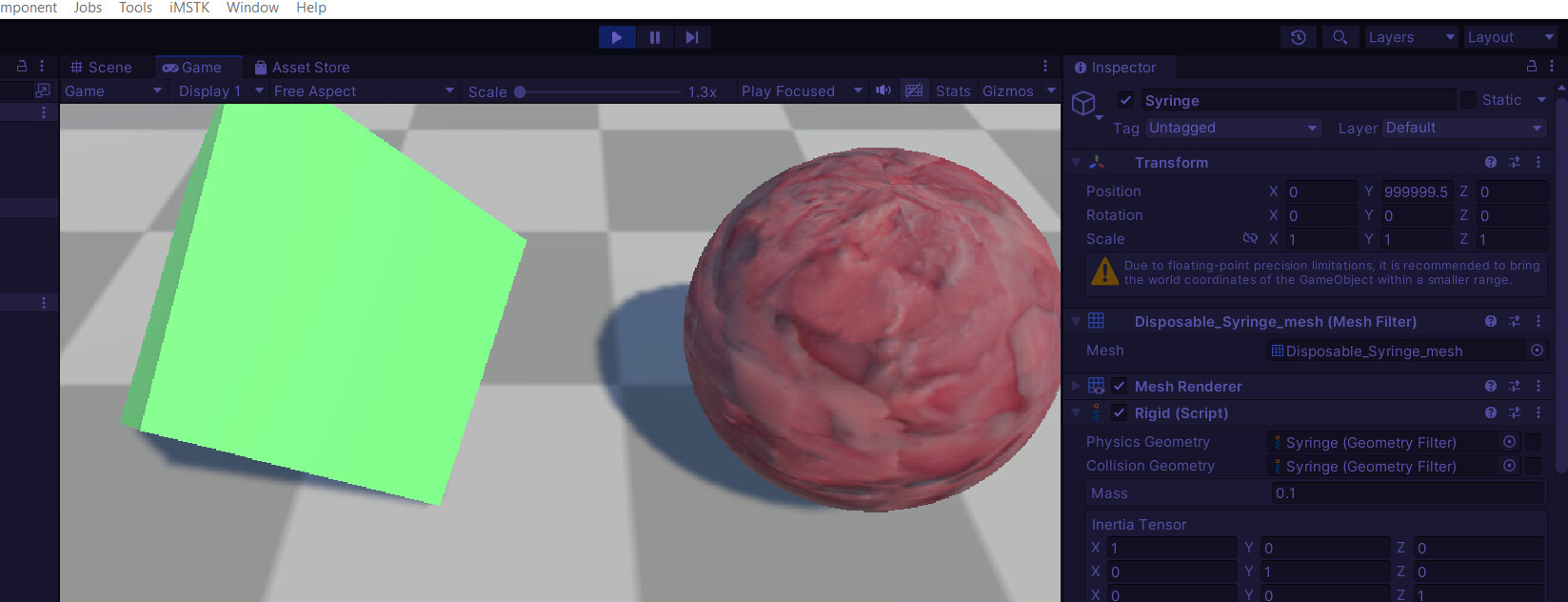
so the script for moving using WASD keyboard works just fine alone but with the rigid and grasping scripts something goes wrong, the position in the device is not interpreted correctly and it keeps fluctuating between -0.45 and 99999999.5,
Something is wrong with synchronization I don’t know which code is responsible for interpreting the unity position to the IMSTK position.
is it related to this?: Please note there are two ways rigids will be used in the simulation, one is as free rigid bodies like a needle or staples.
The other is as tools that are driven via a controller through a device. Currently free rigids cannot be transformed through a unity parent transform.
if you know anything please let me know asap