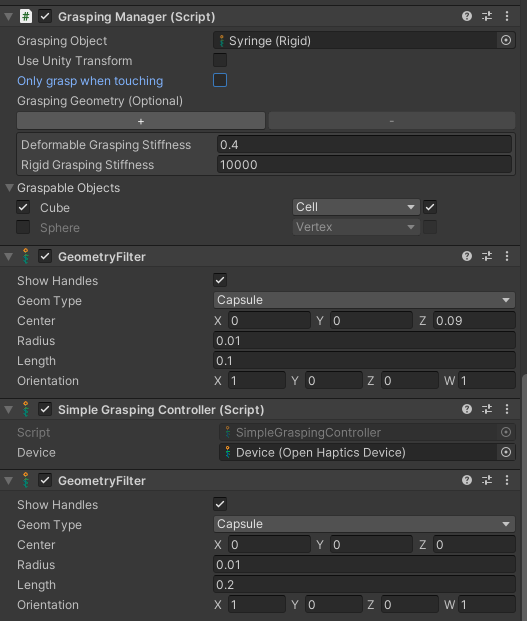
I can move the syringe using the Haptic device, but I am unable to grasp the cube. I have already selected the cube in the Graspable Objects section of the Grasping Manager component, as shown below.
How do I enable the grasping functionality in the current version on GitLab?
Hi Shreerai, I have fixed the scene. We need to add the grasping component since the new version of iMSTK-Unity does not add that component automatically as in the previous one. Thank you!